
みなさんこんにちは!
今回は”第2回ロボットをあやつろう”について説明します。前回の記事はこちらからご覧ください!
今回の目標は、ロボットを右に曲がらせることと四角形のかたちに走らせることです。前回とは違い、今回はロボットの組み立てがないのですぐプログラミングをします。
☆ロボットを右に曲がらせたい
ロボットを右に曲がらせるにはどうしたらいいでしょうか?
実はまっすぐ進むプログラムから1つのブロックを外すだけで、右に曲がるプログラムに変化します。
【右に曲がるプログラム】
次はまっすぐ進んで、右に曲がるにはどうしたらいいでしょうか?※分からなくなった場合は、もう1度まっすぐ進むときのプログラムに戻して考えてみましょう。
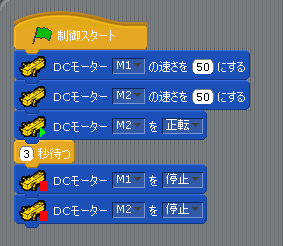
【まっすぐ進んで、右に曲がるプログラム】

☆四角形のかたちに走らせたい
まっすぐ進んで右に曲がることが出来たら、四角形のかたちに走らせることができるまであと少しです!どうしたら四角形のかたちに走るでしょうか?※四角形のかたちはどんなかたちかな?実際のかたちを書いて考えてみましょう。
【四角形のかたちに走るプログラム】
四角形のかたちに走るには、「まっすぐ進んで、右に曲がる」を4回くりかえす必要があります。4回同じプログラムを入れてみるとこんな感じ。何回も同じプログラムを複製(コピー)するのは大変ですし、とても時間がかかります。あとで修正したい時も1つ1つ修正しないといけないのは面倒ですね、、、。

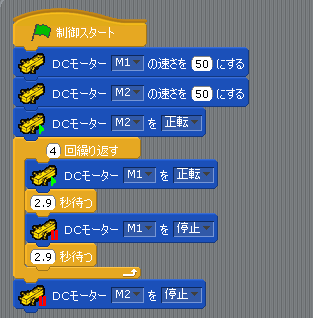
同じプログラムをくり返すときは、「制御」にある「〇回くり返す」でまとめてプログラムを短くしてみましょう!
【四角形のかたちに走るプログラム】 同じプログラムをまとめたバージョン
上のプログラムと比べると、圧倒的にブロックの数が少ないことが分かります。ブロックが少ないということは、あとで修正したいときも簡単に修正できますね!
【ロボットが四角形のかたちに走る様子】
第3回は”ライントレース”です。次は赤外線センサーを取り付けてライントレースができるようになることが最大の目標です!また載せるのでお楽しみに♪